La vibration des insectes, une inspiration pour la science
Parmi les espèces volantes observées dans la nature, les insectes ont certainement les capacités aériennes les plus impressionnantes en termes de vol stationnaire ou d’accélération, et restent inégalés à ces échelles au niveau du poids, de la taille et de leur efficacité énergétique. Si la compréhension des mécanismes de vol a longtemps été sans réponse, on sait aujourd’hui que la clé de telles performances repose principalement sur les mouvements spécifiques obtenus grâce à leurs ailes flexibles ainsi que sur les forces aérodynamiques instationnaires générées. Une approche bio-inspirée semble donc être une voie prometteuse pour concevoir des nano-robots volants.
L’objectif du projet intitulé « nano-robot basé sur le contrôle d’ailes vibrantes » (NANOFLY) entre dans cette catégorie puisqu’il s’agit de réaliser un objet de la taille d’un insecte, alimenté par des fils électriques, capable de décoller et de faire du vol stationnaire.
Vidéo 1 : actionnement des ailes
Vidéo 2 : soulèvement du nano-robot attaché à une poutre rigide
Les premiers développements ont déjà permis des avancées majeures : l’équipe NANOFLY est ainsi la première à avoir employé les technologies des microsystèmes [1] pour fabriquer le squelette du nano-robot d’une envergure de 25 mm. Sa conception s’inspire directement de l’ordre des diptères et est constituée d’un support, d’une partie mobile, un tergum et deux ailes, et d’une partie fixe, le thorax (Fig. 1). L’utilisation de la photolithographie optique et des procédés de gravures offre l’avantage d’être rapide et reproductible, et a conduit à l’obtention d’un squelette en résine polymère SU-8 avec des épaisseurs variant entre 0.4 mm et 0.3 mm ainsi qu’à des membranes pour les ailes en matériau Parylène et d’épaisseurs égales à 400nm. A l’instar des insectes qui se servent de leurs muscles pour faire vibrer leur thorax et entraîner les ailes à plusieurs centaines de battement par seconde, nous avons décidé de travailler avec un système intégralement résonant, sans articulation, excité par un actionneur électromagnétique et avec des ailes flexibles de façon à amplifier le mouvement. En outre, notre originalité est d’utiliser un principe de combinaison de deux modes vibratoires de flexion et de torsion des ailes en quadrature de phase [2], pour reproduire la cinématique adéquate. Les premiers essais ont permis de démontrer l’obtention d’une force de portance équivalente au poids du prototype (22mg) avec des valeurs respectives de 30° et 15° pour les angles de battement et d’inclinaison des ailes (Fig.2).
Les défis actuels concernent le décollage du nano-robot [3] : en premier lieu, l’objectif est de mieux comprendre les effets de couplages aéro-élastiques afin d’obtenir une force de portance 3 fois supérieure à celle du poids des prototypes. Il est en effet essentiel d’accroître cette force de portance si l’on souhaite que le nano-robot soit capable de décoller en transportant une charge utile. Le second défi est d’obtenir sa stabilisation lors d’un vol stationnaire pendant une durée minimale de 10 s, ce qui demande de renforcer la partie commande de vol et de mettre en œuvre les fonctions électroniques nécessaires pour un contrôle à distance. Le troisième défi porte sur une veille scientifique et technologique en vue d’assurer à terme l’autonomie du nano-robot et son utilisation pour des missions de reconnaissance. Il s’agit d’analyser les solutions actuelles et en devenir qui permettraient d’une part, de miniaturiser et alléger la carte électronique existante et d’autre part, d’identifier la charge utile et les sources d’énergie appropriées en choisissant des composants et des capteurs de faible masse nécessitant très peu de ressources énergétiques. Parmi les pistes envisagées, nous nous intéresserons notamment aux circuits électroniques hybridés, aux micro-caméras CMOS et aux super-capacités.
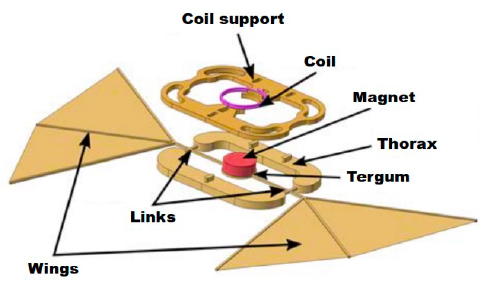
Fig. 1. a) Vue éclatée des différents composants du prototype
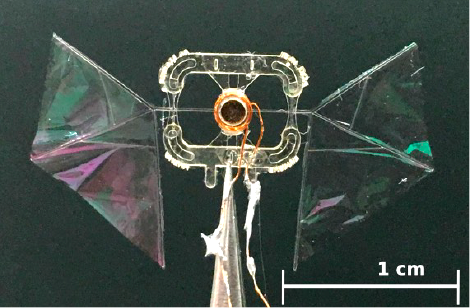
Fig. 1. (b) prototype de nano-robot d’une envergure de 25 mm et d’un poids total de 22 mg
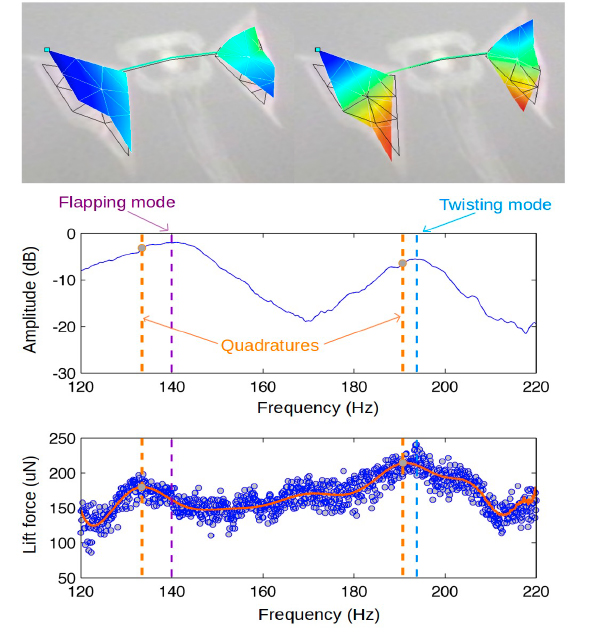
Fig. 2. a) Déformations expérimentales à la résonance : modes de flexion et de torsion, b) Fonction de Réponse en Fréquence du prototype prise à l’extrémité gauche de l’aile du bord d’attaque, zoomée sur la gamme de fréquence d’intérêt. c) Force de portance moyenne pour plusieurs fréquences d’excitation avec ajustement à l’aide d’une courbe polynomiale.
Références :
[1] Bao, X. Q., et al. « Design and fabrication of insect-inspired composite wings for MAV application using MEMS technology. » Journal of Micromechanics and Microengineering 21.12 (2011): 125020.
[2] Faux, D., Thomas, O., Cattan, E., & Grondel, S. (2018). Two modes resonant combined motion for insect wings kinematics reproduction and lift generation. Europhysics Letters, 121(6), 66001.
[3] Grondel, Sébastien, et al. « Towards the use of flapping wing nano aerial vehicles. » Modern Technologies Enabling Safe and Secure UAV Operation in Urban Airspace 59 (2021): 52.
Dissémination vers le grand public :
1. E. Cattan
Le plus petit drone du monde présenté à Valenciennes, Journal Télévisé France 3, 19/20 Nord Pas-de-Calais, 10 octobre 2023
https://france3-regions.francetvinfo.fr/archives/2023/10-octobre-2023
2. E. Cattan, S. Grondel, Quand la nature inspire l’innovation, Exposition à l’IMTD, 10 octobre 2023
https://imtd.fr/evenements/expo-nature-inspire-innovation/
3. S. Grondel, E. Cattan, Ces chercheurs qui se sont mis en tête de faire voler un drone de la taille d’une mouche, La Voix du Nord, 4 octobre 2023
https://www.lavoixdunord.fr/1381005/article/2023-10-04/ces-chercheurs-qui-se-sont-mis-en-tete-de-faire-voler-un-drone-de-la-taille-d
4. S. Grondel, H. Poirier, Du microrobot au nanorobot, France Culture, Continent sciences, 30 mai 2016
https://www.radiofrance.fr/franceculture/podcasts/continent-sciences/du-microrobot-au-nanorobot-2637360
5. S. Grondel, Le robot-abeille, Science & Vie, n°1185, 58-59, juin 2016,
https://www.science-et-vie.com/article-magazine/robot-abeille-ses-ailes-vibrantes-reinventent-le-vol